Navigating the "Trolley Problem" in Autonomous Driving
 02/25 2025
02/25 2025
 453
453
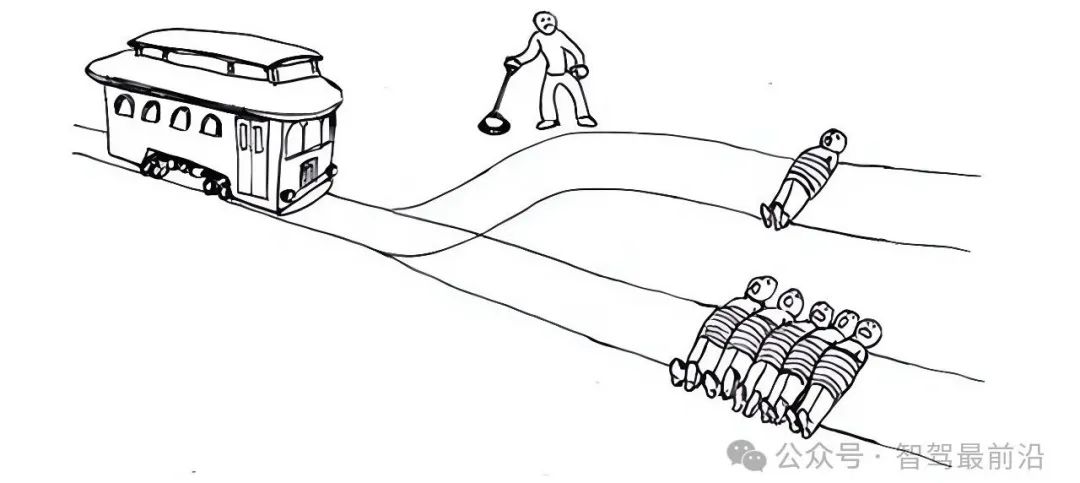
In recent years, autonomous driving technology has surged ahead at an unprecedented pace, gradually integrating into public life. While heralding convenience and safety, it has also sparked debates on a myriad of ethical, legal, and social implications, notably the resolution of the "Trolley Problem" within the autonomous driving realm. The classic trolley problem posits a dire scenario: a madman has tied five innocent individuals to the tracks of an electric trolley. An out-of-control trolley hurtles toward them, poised to crush them in an instant. You have the power to pull a lever, redirecting the trolley onto another track. However, the madman has also tethered a person to that alternate track. Faced with this dilemma, would you pull the lever?

The "Trolley Problem" in Autonomous Driving
In the evolution of autonomous driving, encountering the "Trolley Problem" is inevitable: when confronted with an unavoidable accident, should the system prioritize the safety of the vehicle's occupants or that of pedestrians on the road? Essentially, does the autonomous driving system safeguard passengers or pedestrians? Given the unpredictability of real-world traffic conditions, the decision-making window for autonomous systems in accident scenarios is exceedingly narrow, necessitating rapid information processing. The "Trolley Problem" in autonomous driving transcends theoretical discourse; it's a tangible challenge requiring technological and systemic solutions.

Human drivers rely primarily on observing road conditions and controlling the vehicle, with driving behavior heavily influenced by experience, intuition, driving habits, emotions, distraction levels, and physiological reaction times, sometimes leading to flawed decisions. Conversely, autonomous vehicles harness advanced sensors, deep learning algorithms, and real-time data processing systems, boasting reaction speeds and accuracy far surpassing those of humans. Current autonomous driving systems employ an array of technologies such as LiDAR, millimeter-wave radars, high-definition cameras, and high-precision maps to achieve comprehensive environmental perception. Through multi-sensor data fusion, vehicles can construct detailed 3D environmental models, determine the speed, direction, and potential changes of obstacles ahead, thereby providing robust information support for decision-making systems. This allows the system to proactively mitigate risks in most scenarios. While it may seem that autonomous driving systems surpass human drivers in safety, is this truly the case?
Technological sophistication does not guarantee the eradication of ethical quandaries. Autonomous driving systems may still confront decision-making dilemmas in extreme scenarios, such as narrow roads or sudden situations where multiple obstacles or pedestrians appear simultaneously. The system may face multiple mutually exclusive options. In such instances, how can risk assessments be conducted and precise decisions made within milliseconds?
For autonomous vehicle owners, in the eyes of system developers, they are customers. It is logical for developers to prioritize providing superior services to customers when devising rules, often favoring "passenger priority" over "pedestrian priority" in autonomous driving protocols. This is a common commercial consideration, but from an ethical and moral perspective, both pedestrians and passengers are living beings. How can their safety be determined by code? As mentioned, being a passenger is temporary; one inevitably becomes a pedestrian in daily life. After such a role reversal, how should one view autonomous vehicles from a pedestrian's perspective? No one desires to be a "sacrifice" in the era of autonomous driving, making a perfect solution elusive.

Introduction to Feasible Solutions
Numerous research and development teams have incorporated the principle of "risk minimization" into decision-making algorithms, attempting to quantify the potential risks of each choice through mathematical models and statistical methods. For instance, when the system detects two potential avoidance routes, it comprehensively considers factors like vehicle speed, steering angle, and road conditions to calculate the probability of harm for each option and selects the one with the lowest overall risk. Theoretically, this approach can prevent one party from suffering greater harm and minimize accident-related losses. However, does this solution align with ethical values?
Experts also suggest continuously optimizing system algorithms through extensive simulations, real-vehicle testing, and big data analysis to enhance the system's responsiveness to various complex scenarios. For example, by analyzing pedestrians' gait, behavioral patterns, and environmental factors using deep learning models, the system can predict possible pedestrian movement trajectories in advance and even initiate deceleration measures before pedestrians enter the lane. In emergencies, the system can swiftly make judgments based on preset safety rules to mitigate unforeseen risks. This approach, reliant on massive data training and real-time computation, empowers autonomous driving systems to handle emergencies with greater precision and efficiency. The key to the future development of autonomous driving technology lies not in solving the "Trolley Problem" but in preventing vehicles from being placed in extreme situations requiring sacrifice through proactive measures and holistic coordination.
The introduction of end-to-end technology presents another feasible solution to the "Trolley Problem" in autonomous driving. Leveraging artificial intelligence for self-decision making, it allows the autonomous driving system to transcend human-set rule frameworks and address emergencies through self-reflection. While promising, the "black box" nature of end-to-end technology raises concerns about the transparency and controllability of the decision-making process. In practical applications, how can the logical fairness and clarity of the system's decision-making be ensured? To address this, many companies are exploring ways to integrate "ethics modules" into autonomous driving systems, adding a layer of ethical rule-based judgment mechanisms alongside decision-making algorithms. This module not only conducts real-time monitoring and interpretation of the system but also provides detailed records of decision-making bases for subsequent review and responsibility determination. This could be a viable solution to the "Trolley Problem" in autonomous driving.

Conclusion
Undeniably, the advancement of autonomous driving technology will ultimately revolutionize human travel and societal structures. With the continuous integration of artificial intelligence, big data, cloud computing, and Internet of Vehicles technologies, future transportation systems will achieve true intelligent management. In this system, vehicles, roads, and traffic management centers will share information through high-speed and stable communication networks, forming a seamless and secure network. Vehicles can not only autonomously perceive and predict potential risks but also disperse traffic flow and optimize driving routes through coordinated scheduling, thereby avoiding traffic congestion and the concentrated outbreak of accident risks. Technology based on data analysis and behavior prediction will enable vehicles to swiftly conduct multi-scenario assessments and choose the safest and most reasonable response measures in complex situations. This globally coordinated intelligent transportation system represents the most potent response to the "Trolley Problem" in autonomous driving.
-- END --
-
![]()
Who is the True Victor: Smart Driving Equality or Smart Driving Subscription?
-
![]()
Can Tesla Still Stage a Comeback in 2025?
-
![]()
AI: Catalyzing a Trillion-Dollar Ecological Transformation for Operators
-
![]()
AI Mobile Phones: Dawn of the "DeepSeek Era"?
-
![]()
Alibaba Leads the AI Investment Frenzy: An Unprecedented Commitment
-
![]()
Navigating the "Trolley Problem" in Autonomous Driving
-
![]()
Tech Titans Rekindle Investment Surge: Alibaba Injects RMB 380 Billion into AI Cloud Infrastructure
-
![]()
Alibaba Unveils Bold Strategy Amid Layoffs and Strong Financial Performance







