Analysis of NOA Function in High-level Autonomous Driving: Technical Architecture and Implementation Path
 04/08 2025
04/08 2025
 476
476
Produced by Zhineng Technology
NOA (Navigation on Autopilot), as the linchpin of high-level autonomous driving, encompasses three primary domains: highway intelligent navigation-assisted driving, memory driving/commuting mode, and urban intelligent navigation-assisted driving.
Its execution hinges on a sophisticated system architecture and seamless multi-module integration. Drawing from engineering perspectives and adhering to international standards like ISO 22737, we delve into NOA's functional modules, including the Operational Design Domain (ODD), hazard recognition, Minimum Risk Maneuver (MRM), emergency stop, and commuting mode design. Furthermore, we explore its state machine design and transition logic.
Through a comprehensive analysis of the system architecture and development tasks, this article unveils the pivotal challenges and solutions in NOA's technical implementation. As NOA technology rapidly evolves, its implementation necessitates a delicate balance of functionality, safety, and user experience.
01
Analysis of NOA Functional Modules:
From Architecture to Core Technology
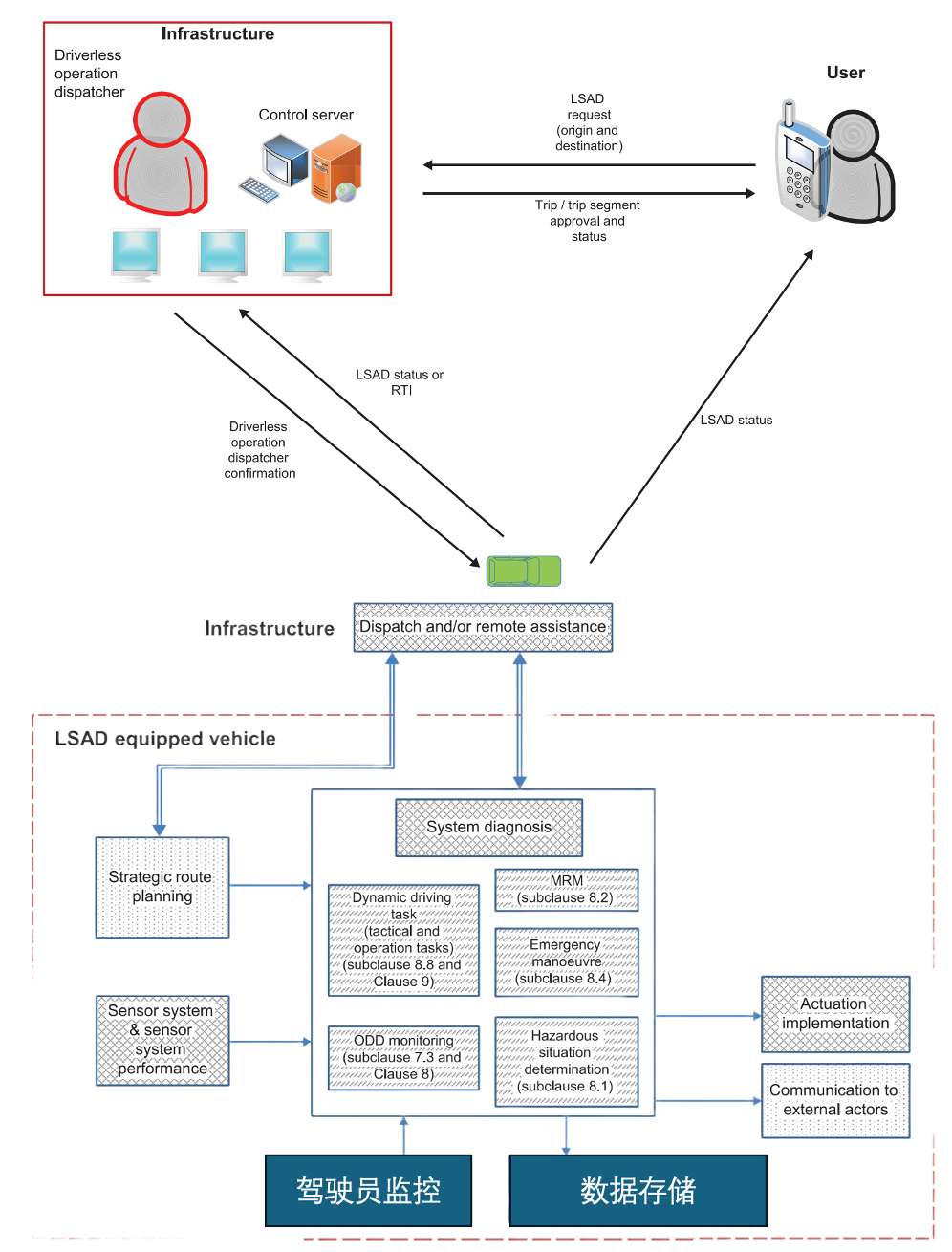
As a high-level autonomous driving feature, NOA's system architecture integrates various sub-modules to ensure seamless path planning, environmental perception, and Dynamic Driving Tasks (DDT) execution.
In accordance with the ISO 22737 framework, a comprehensive autonomous driving system comprises sub-modules such as path planning, perception and recognition, ODD monitoring, DDT, hazard recognition, MRM, emergency stop, control execution, driver monitoring, data storage, and V2X communication.
● These modules collaborate to ensure the system's safety and reliability in complex scenarios.
◎ The perception and recognition module furnishes environmental data through lidar, cameras, and millimeter-wave radars.
◎ The path planning module generates driving trajectories leveraging high-precision maps.
◎ The control execution module translates planning into actual vehicle movements.
Note: Currently, the entire architecture is transitioning towards end-to-end and VLA approaches. We will examine past, present, and future transformations from a holistic system perspective.
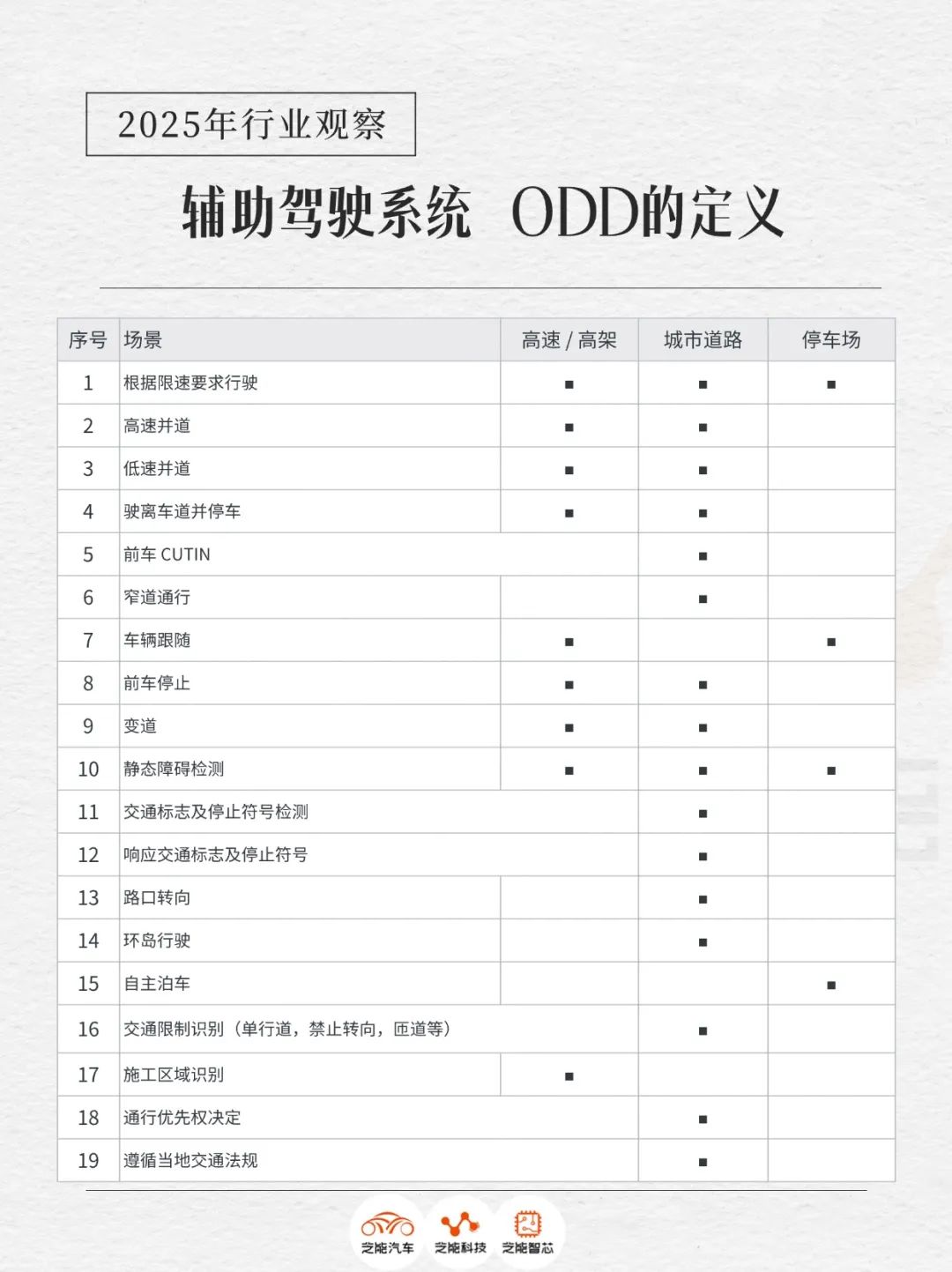
ODD forms the bedrock of NOA function design, and clearly delineating the system's applicable operating conditions is paramount for ensuring safety.

● ODD must encompass the following crucial elements:
◎ Speed: e.g., 80km/h in sunny weather, reduced to 60km/h in rainy conditions, and further limited to 40km/h on bumpy roads.
◎ Area: supports highways and urban main roads, excluding unpaved roads or narrow alleys.
◎ Route: predefined navigation paths, such as fixed commuting routes.
◎ Lighting: supports a range of 100-10,000 lux, encompassing scenarios from daytime to nighttime artificial lighting.
◎ Weather: adaptable to sunny weather, light rain, and moderate rain, but may exceed ODD in heavy rain or fog.
◎ Road: requires clear lane lines, paved surfaces, and no severe subsidence or ponding.
◎ Obstacles: detects pedestrians, cyclists, and static objects like roadblocks or parked vehicles.
The system continuously monitors ODD status to ascertain its adherence to design parameters. In case sensors detect visibility dropping below ODD thresholds due to heavy fog, the system triggers an exit mechanism. This dynamic monitoring necessitates high-precision sensors and real-time data processing, requiring optimized algorithms to minimize false positives.
● The NOA system promptly recognizes hazards and initiates evasive actions. Hazards are categorized as unoccluded and occluded:
◎ Unoccluded hazards: like pedestrians crossing or cyclists traveling parallel. The system identifies and predicts their trajectories using target detection algorithms, avoiding them through braking or lane changes.
◎ Occluded hazards: like pedestrians suddenly appearing from behind, requiring multi-sensor fusion (e.g., lidar and cameras) to enhance perception.
ISO 22737 mandates handling these scenarios. Engineering implementation necessitates robust perception models to ensure recognition accuracy under occlusion or low light. Additionally, the system must issue external warnings (e.g., honking or flashing lights), necessitating high-performance V2X communication.
● When NOA cannot continue DDT, MRM is activated to place the vehicle in a Minimum Risk Condition (MRC). Trigger conditions include:
◎ Encountering unmanageable hazards (e.g., complex intersections with mixed traffic).
◎ System failures (e.g., sensor malfunction).
◎ V2X communication disruption.
◎ Approaching ODD limits (e.g., entering an unpaved road).
MRM execution may involve deceleration, stopping within the lane, or changing lanes to pull over. For instance, upon detecting an accident ahead on a highway, the system decelerates and pulls over, activating hazard lights. Engineering design ensures smooth MRM transitions to prevent secondary risks like rear-end collisions.
● The emergency stop function enables users or dispatchers to intervene actively. Trigger scenarios include:
◎ Passenger discomfort (e.g., motion sickness).
◎ System anomalies (e.g., path deviation).
◎ Autonomous driving capability loss (e.g., hardware failure).
In implementation, the emergency stop button must be prominently placed. Upon triggering, the system immediately decelerates and stops, accompanied by external warnings. Reactivation requires driver confirmation to ensure system integrity, necessitating human-machine interaction design that balances convenience with mis-touch prevention.
● Commuting mode, a NOA innovation, optimizes daily driving through memorized trajectories. Core technologies include:
◎ Memory trajectory recording: logs latitude and longitude points under global coordinates, encompassing vehicle actions (e.g., steering, braking) and environmental data (e.g., lane line positions).
◎ Global-to-local transformation: aligns recorded trajectories with real-time perception data to generate local navigation paths, utilizing SLAM (Simultaneous Localization and Mapping) for calibration.
◎ Trajectory tracking: executes precise control based on local paths, combined with perceived lane lines and obstacles.
Engineering implementation can utilize traditional rules or AI models to generate navigation trajectories. The challenge lies in managing dynamic environmental changes, necessitating real-time perception-based trajectory adjustments.
02
NOA State Machine Design:
Logic and Implementation

● NOA's state machine design adheres to ISO 22737, comprising three main states (OFF, Standby, and Active) with several sub-states, clearly defining system behavior at each stage to avoid functional overlap.
◎ OFF state: inactive, suitable when the vehicle is off or in standby.
◎ Standby state: ready for activation, including ODD verification, communication establishment, and maintaining stillness.
◎ Active state: executes DDT, divided into default DDT, emergency stop (e-stop), MRM, and Minimum Risk Condition (MRC) sub-states.
State transition logic is the system's operational core, spanning conditions from A1 (OFF to Standby) post power-on self-test to C6 (e-stop to Standby) after driver confirmation of emergency resolution.
Engineering implementation faces challenges in real-time performance, robustness, and user experience, requiring swift and accurate state transitions, adapting to sensor noise or communication interruptions, and ensuring smooth state switching with timely user feedback.
Thus, adopting a finite state machine framework integrated with a real-time operating system and high-performance computing platform is crucial to support complex perception and decision-making algorithms. The overall design ensures safe and effective state transitions under various conditions, enhancing autonomous driving system reliability and user experience.
Summary
NOA heralds the dawn of autonomous driving. From ODD definition to hazard recognition to MRM and commuting mode innovations, the NOA system must achieve precise coordination across perception, decision-making, and control. Engineering practice still confronts numerous challenges.
-
![]()
DingTalk's Decade: A Return to Roots
-
![]()
iPhone 17 Pro Max Unveiled: Apple's Decade-Defining Upgrade?
-
![]()
Strong provincial capital rivalry: Hefei accelerates its approach to Jinan
-
![]()
Humanoid Robot Weekly | April 16: Expansion of Application Scenarios by Leading Humanoid Robot Firms
-
![]()
Breaking Through: Chinese Automakers' €12.7 Billion Leap into the European Market
-
![]()
European Auto Market | Norway March 2025: Sales Exceed Expectations
-
![]()
Easing of EU Electric Vehicle Tariffs Opens New 'Export' Avenues for Chinese Automakers Amid Trump's Tariff Threats
-
![]()
Major Shakeup in Domestic Mobile Phone Market: Xiaomi Leads in 2025, Huawei Takes Second, Apple Drops to Fifth







